Generalist's new physical robotics AI brings “production-level” success rates
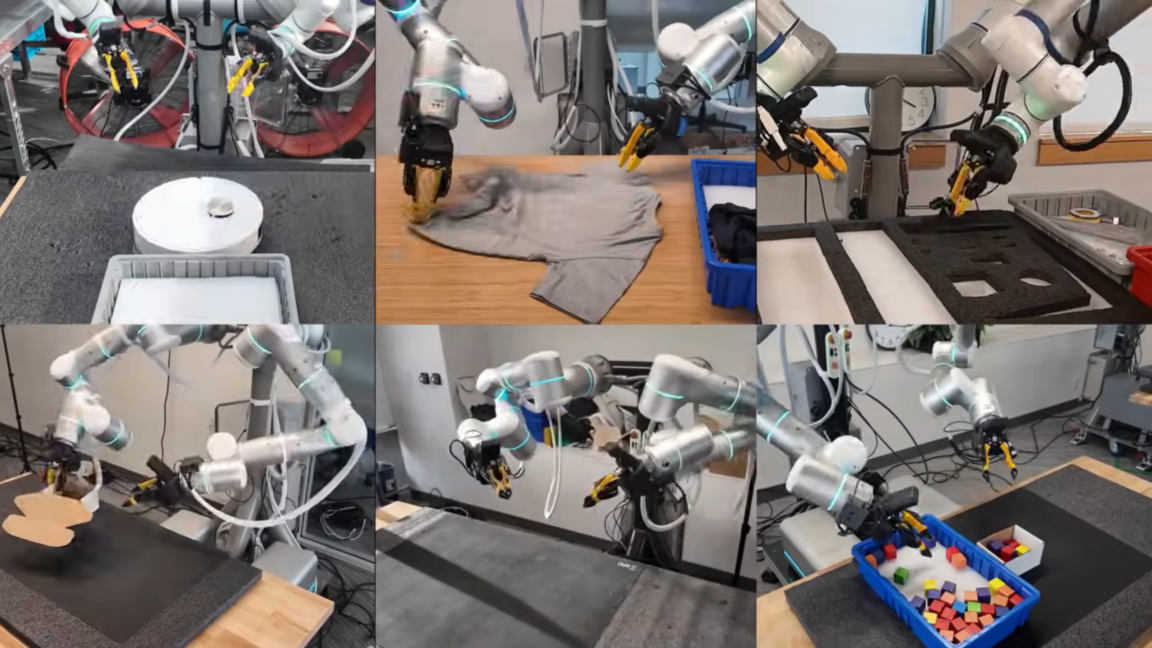
Foto: Generalist
Half a million hours of recordings and petabytes of data on physical interactions have allowed Generalist to create GEN-1—an AI system that achieves "production-level effectiveness" in tasks previously requiring human dexterity and muscle memory. This is a breakthrough in robotics, moving the field from the experimental phase to real-world industrial applications. The key to success was bypassing the industry’s greatest barrier: the lack of high-quality training data regarding object manipulation. While LLMs learn from internet text, Generalist utilized proprietary "data hands"—wearable grippers that record human micro-movements during work. The GEN-1 model represents an evolution of the GEN-0 version, proving that scaling laws also apply to the physical world—the more data and computing power, the greater the machine's precision. However, the most significant innovation is the system's ability to improvise and react to disturbances in real time. The robot can combine concepts from various scenarios to solve new, unforeseen problems. For users and companies, this signals the arrival of the era of universal robots that do not require tedious programming of every motion path, but instead learn to perform complex manual tasks almost as naturally as humans. This technology paves the way for the full automation of processes previously considered too chaotic for machines.
The robotics industry has just crossed a threshold that only a few years ago seemed unattainable without direct human supervision. The company Generalist, specializing in machine learning for physical systems, has unveiled the GEN-1 model. This is not just another laboratory curiosity, but a system that, according to the creators' declarations, achieves "production-level effectiveness" in tasks requiring precision, dexterity, and – most importantly – improvisation. In a world where robots usually fail at the slightest deviation from a programmed pattern, GEN-1 introduces a new quality: the ability to handle unforeseen disturbances in real-time.
The key to the breakthrough is a departure from rigid algorithms in favor of flexible physical intelligence. The GEN-1 model can combine ideas from different training scenarios to solve problems it has not encountered before. This means that if a robot encounters an obstacle or an object moves in an unexpected way, the system will not "hang," but will independently develop a new movement. This is a fundamental shift in the approach to automation, bringing machines closer to the level of human muscle memory and motor intuition.
Scaling data in the physical world
The success of GEN-1 is built on the foundation laid by its predecessor, the GEN-0 model. Last November, Generalist proved with GEN-0 that the so-called scaling laws, which revolutionized Large Language Models (LLMs), also apply to robotics. It was demonstrated then that increasing the amount of pre-training data and computational power translates directly into better performance after training is complete. However, robotics faces a problem unknown to the creators of GPT-4 or Claude: the lack of massive resources of ready-made digital data.
Read also


While text models can draw from trillions of words available on the internet, robots do not have a global repository of high-quality data on how human hands manipulate objects in three dimensions. To bridge this gap, Generalist had to create its own data collection ecosystem. For this purpose, they used a proprietary solution called data hands – a set of hand-worn grippers that record every micro-movement and visual signal during manual tasks performed by humans. This approach allowed for the accumulation of a database on a scale previously unseen in this industry.
As a result, Generalist currently possesses over half a million hours of recordings and petabytes of physical interaction data. It is this critical mass of information that allowed GEN-1 to achieve a fluidity previously reserved exclusively for human operators. The model does not just copy movements but understands the physics of the environment, allowing it to operate in dynamic, constantly changing industrial environments.
Improvisation instead of rigid code
The biggest challenge for modern robotics is not repeatability, but responding to chaos. Traditional systems require precise positioning of every element on the production line. GEN-1 changes this dynamic by introducing the ability to "improvise new movements." If an object the robot is supposed to pick up is bumped or falls in an unnatural way, the model can correct the gripper's trajectory on the fly. This is possible due to a unique architecture that allows the system to creatively combine learned patterns to find a way out of a new situation.
The ability to "combine ideas from different places" suggests that Generalist has created a model with a high degree of generalization. This means that skills acquired while learning one activity – for example, gently picking up fruit – can be adapted to handle delicate electronic components without having to undergo a full training cycle from scratch. This drastically shortens the deployment time of robots for new tasks, which is crucial for companies with variable production profiles.
It is worth noting the technical specification of this process. GEN-1 operates on data coming directly from visual and kinesthetic sensors, eliminating the need for expensive and complex external positioning systems. By using the data hands device, the model learns not only the final result of a movement but the entire spectrum of forces and tensions that accompany human work. It is these details that make the model's successes described as "production-level" – they are simply reliable enough to be entrusted with real business processes.
A new paradigm in physical automation
The emergence of GEN-1 signals the end of an era where robots were merely "programmable machines." We are entering a phase of autonomous physical agents that can learn from mistakes and adapt to their surroundings. The scale of petabytes of data mentioned by Generalist sets the bar very high for the competition. Building physical AI requires not only advanced algorithms but, above all, a unique infrastructure for acquiring data from the real world, which the company achieved using its proprietary hardware.
The limitations that have held back robotics until now – such as lack of flexibility or high reconfiguration costs – are beginning to disappear. GEN-1 proves that with the right amount of training data, machines can acquire dexterity that until now seemed to be a purely biological domain. This is not about replacing humans in simple tasks, but about creating systems capable of cooperating in complex, unpredictable conditions where every second of downtime generates losses.
One could argue that Generalist has just paved the way for a "GPT moment" in robotics. If the scaling of physical data proceeds at the same pace as in the case of language models, we will soon see systems that do not need to be programmed for any specific task. They will possess general knowledge of how to manipulate matter, and their deployment will come down to showing them the goal they are to achieve. GEN-1 is the first, incredibly solid step toward this reality, where the boundary between human dexterity and machine precision finally blurs.






